えむラボ
えむラボ
スケッチの作成
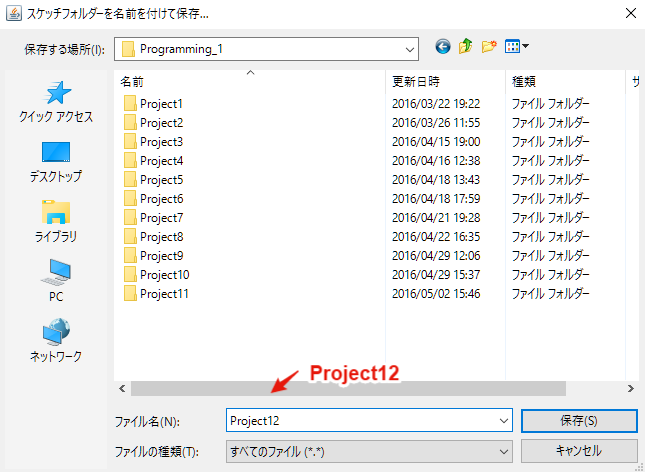
Processingを起動して,新規にスケッチを保存しましょう. メニューから[ファイル]-[名前を付けて保存]をクリックして,「スケッチフォルダを名前を付けて保存」を開きます. ファイル名に「Project12」を入力し,[保存]をクリックしましょう. 保存先に「Project12」という名前のフォルダが作成されていることを確認してください.
NyARToolkitの導入
ARToolkit は奈良先端科学技術大学院大学の加藤研究室によって 開発された拡張現実(Augumented Reality: AR)のためのソフトウェアです. 拡張現実とは,コンピュータを利用して,現実世界の一部に「仮想的な物体や情報」を重ねて表示することを指します. この ARToolkit のProcessing向けのライブラリが「 NyARToolkit for Processing 」です.
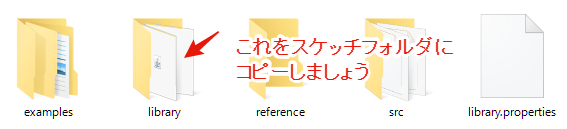
GitHubのリリースページから, 最新バージョンのNyARToolkitをダウンロードしましょう. ダウンロードしたファイルはZIPで圧縮されているので解凍し, 解凍後の library フォルダをコピーして,「スケッチフォルダ(Project12)」の中に配置しましょう. コピーしたら,フォルダの名前を library から code に変更します. 同様に,カメラの設定ファイル camera_para.dat も「スケッチフォルダ(Project12)」の中にコピーしておきます.
次に,ソースコードの先頭に「 import jp.nyatla.nyar4psg.∗ 」を入力してください. また,今回もカメラ映像を利用するため,[スケッチ]-[ライブラリをインポート]-[Video]をクリックして, Videoライブラリをインポートしておきます.
カメラ映像の表示
Capture クラスを利用して,カメラから入力した画像を表示しましょう. 下記を参考にコードを入力したら,Runボタンをクリックしてください. ここでは, サイズ(size) が 320x240 , フレームレート(fps) が 30 となっている, 3 番のカメラを使用していることに注意してください. ウィンドウにカメラ映像が表示されることを確認してください.
拡張現実の表示
ARToolkitを利用すると,ARマーカー と呼ばれる特定のパターンをカメラで読み取ることにより, その位置を認識し,3Dオブジェクトを配置することができます. ここでは,NYARToolkitに標準搭載されている NyID を利用します. NyIDには番号が設定されており, ここではMODEL2の1番のNyIDを利用します.

まずは,下記のように, MultiMarker クラスを利用して,利用するマーカーを設定します.
MultiMarker クラスのインスタンスを作成するときは,カメラ映像の幅と高さに加え,
カメラのパラメータファイル( camera_para.dat )を指定します.
また,対象のNyIDを登録するには,addNyIDMarker()関数を利用します.
引数には「 NyIDの番号 」と「 マーカーの物理サイズ(mm) 」を指定します.
marker = new MultiMarker(this, 320, 240, "camera_para.dat");
marker.addNyIdMarker(1, 80);
次に,detect()関数で,カメラ映像からマーカーを検出し,
drawBackground()関数でカメラ映像を背景に設定します.
いずれの関数も引数には Capture クラスのインスタンスを渡します.
marker.detect(cam);
marker.drawBackground(cam);
最後に,マーカーが検出された場合に,立方体をマーカー上に配置します.
ここで,beginTransform()関数によって,原点をカメラに映ったマーカーの中心に変更していることに注意してください.
endTransform()関数で,元の座標系に戻ります.
if(marker.isExist(0)){
marker.beginTransform(0);
box(50, 50, 50);
marker.endTransform();
}
下記を参考にコードを入力したら,Runボタンをクリックしてください. マーカーをカメラに映すと立方体が表示されることを確認してください.
カメラ映像を確認すると,マーカーの中心を原点とした立方体を表示するため,
立方体が紙を突き破っていることが分かります.
そこで,translate()関数を利用して,立方体の1辺の長さの半分(25)だけ,
Z軸方向にずらしてみましょう.
下記を参考にコードを入力したら,Runボタンをクリックしてください.
立方体がマーカーの表面に乗っているように表示されることを確認してください.
課題
マーカーの表面に乗っているように,sphere()関数を利用して半径50の球を表示させてください.
課題が完成したら,作成したスケッチをZIPアーカイブ形式で保存します.
ZIPアーカイブを作成するには,メニューから[ツール]-[スケッチをアーカイブ]をクリックして,「スケッチを名前を付けてアーカイブする」を開きます.
保存するファイル名を確認した上で,[保存]をクリックします.
保存先に「Project12-日付a.zip」というファイルが作成されていることを確認してください.