 えむラボ
えむラボ
Simple AIとは
Simple AIは,Stuart Russel氏とPeter Norvig氏が執筆した 「Artificial Intelligence: A Modern Approach」に掲載されている 人工知能で用いられる伝統的なアルゴリズムを提供するPythonのライブラリです. このライブラリを導入することで, 幅優先探索などの 探索アルゴリズム,遺伝的アルゴリズムなどの 進化的アルゴリズム, 決定木などの 機械学習アルゴリズム を簡単に実装することが可能です. ここでは,授業で紹介したアルゴリズムを Simple AI で実装することで, 知識を定着させ,様々な問題に応用できるようになることを目指します.
ノートブックの作成
Google Colaboratory を起動し,新規にノートブックを作成してください. ノートブックのタイトルは AI-3 とします. ノートブックの作成方法は第1回の資料を参照してください.
最初に Simple AI をインストールします. セルで下記のコマンドを実行してください.
!pip install simpleai
水差し問題
今回は 水差し問題(Jug Problem) を取り上げましょう.
水差し問題
3リットルと4リットルのコップ(水差し)がある.
4リットルのコップに正確に2リットルの水を入れるにはどうしたらよいか.

この問題を 状態空間モデル で表現します. 状態空間モデルとは,探索過程の途中経過を 状態, またその状態間の遷移を 行動(操作) として表現したモデルです. 一般に,行動の結果,1通りに状態が定まるとき, 確定システム , 確率的に状態が変化するとき, 確率システム と呼ばれます. 現実世界の事象の多くは 確率システム となりますが, ここではシンプルな 確定システム のみを対象とします.
状態空間モデル
3リットルのコップの水の量を$x$, 4リットルのコップの水の量を$y$と表し, この組み合わせを状態と定義する. $$ (x, y) $$ コップに対する行動(操作)として下記の6つを定義する.
- A1: 3Lのコップを満杯にする
- A2: 4Lのコップを満杯にする
- A3: 3Lのコップを空にする
- A4: 4Lのコップを空にする
- A5: 3Lのコップの水を溢れないように4Lのコップに移す
- A6: 4Lのコップの水を溢れないように3Lのコップに移す
See the Pen Tower of Hanoi by Naoto Mukai (@nmukai) on CodePen.
実装
クラスの定義
最初にライブラリをインポートします.
ここでは,探索問題の型 を表すSearchPrblemと
幅優先探索 を表すbreadth_firstをインポートします(幅優先探索に関しては第4回で解説予定).
from simpleai.search import SearchProblem, breadth_first
次に 初期状態 と 目的状態 を定義します.
初期状態は両方のコップに水がない状態を表す (0, 0),
目的状態は4リットルのコップに2リットルの水がある状態を表す(0, 2)です.
START = (0, 0)
GOAL = (0, 2)
インポートしたSearchProblemクラスをオーバライドして,
水差し問題を表すJogProblemを定義します.
オーバライドするメソッドは,actions,result,is_goalの3種類です.
class JugProblem(SearchProblem):
def actions(self, state):
...
def result(self, state, action):
...
def is_goal(self, state):
...
actions(self, state)
このメソッドでは,状態stateで選択可能な行動のリストを返します.
ここでは,上記で定義した6つの行動を文字列のリストとして表現します.
def actions(self, state):
return ["A1", "A2", "A3", "A4", "A5", "A6"]
result(self, state, action)
このメソッドでは,状態stateで,行動actionを実行したときに遷移する次の状態を返します.
また,state[0]は3Lのコップの水量,state[1]は4Lのコップの水量を表します.
minとmaxは,それぞれ引数の最小値と最大値を選択するメソッドです.
if文を利用して,行動actionに応じて,コップの状態を変化させています.
def result(self, state, action):
if action == "A1":
s = (3, state[1])
elif action == "A2":
s = (state[0], 4)
elif action == "A3":
s = (0, state[1])
elif action == "A4":
s = (state[0], 0)
elif action == "A5":
g1 = max(state[0] - (4 - state[1]), 0) #3Lのコップの水量
g2 = min(state[1] + state[0], 4) #4Lのコップの水量
s = (g1, g2)
elif action == "A6":
g1 = min(state[0] + state[1], 3) #3Lのコップの水量
g2 = max(state[1] - (3 - state[0]), 0) #4Lのコップの水量
s = (g1, g2)
return s
is_goal(self, state)
このメソッドでは,状態stateが目的状態かどうかを判定します.
ここでは,状態stateがGOALと一致すれば目的状態に達したと判断します.
def is_goal(self, state):
return state == GOAL
解の探索
幅優先探索(探索木)breadth_firstを用いて解を探索します.
解とは初期状態STARTから,目的状態GOALまでのパス(経路)を意味します.
探索過程における冗長な状態を省略するためにgraph_search=Trueという引数を設定していることに注意してください.
problem = JugProblem(initial_state=START)
result = breadth_first(problem, graph_search=True) #幅優先探索
探索が終了したら,最終状態,パス,コストを表示します.
最終状態は(0,2)となっており目的状態に到達できたことがわかります.
A1,A5,A1,A5,A4,A5の順にルールを適用した結果,
パスは(0, 0), (3, 0), (0, 3), (3, 3), (2, 4), (2, 0), (0, 2)となりました.
このとき,初期状態から目的状態までのコスト(ステップ数)は6です.
print("State:", result.state)
print("Path:", result.path())
print("Cost:", result.cost)
State: (0, 2)
Path: [(None, (0, 0)), ('A1', (3, 0)), ('A5', (0, 3)), ('A1', (3, 3)), ('A5', (2, 4)), ('A4', (2, 0)), ('A5', (0, 2))]
Cost: 6
探索木(解の探索過程)
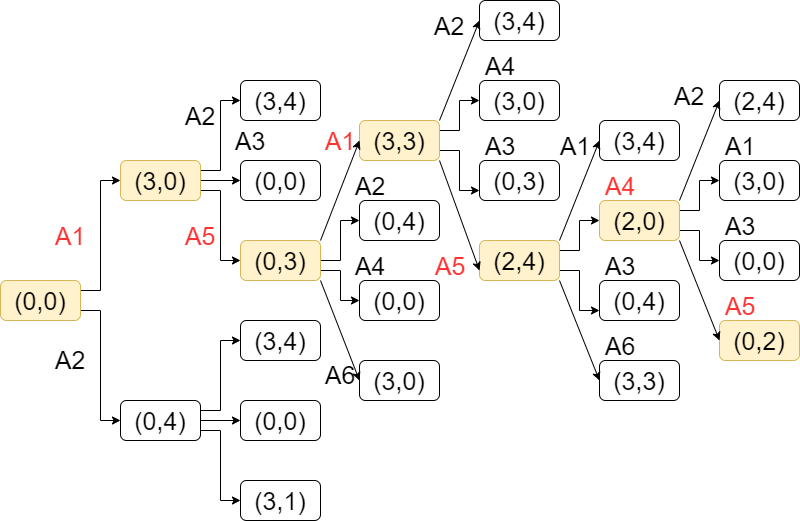
初期状態(0, 0)から目的状態(0, 2)までの探索過程は次の図で表すことができます.
初期状態(0, 0)に適用可能な行動は,A1とA2のいずれかです(その他の行動は状態に変化がないため).
A1を適用すると,3Lのコップに水を満杯にするため,状態は(3, 0)になります.
同様にA2を適用すると,4Lのコップに水を満杯にするため,状態は(0, 4)になります.
この新しく生成された状態に対し,さらに適用可能な行動を繰り返し,目的状態(0, 2)に到達すると探索は終了です.
この探索は,木の形 に状態が展開されていくことから,探索木 と呼ばれます.
探索過程において,既に探索済みの状態が生成された場合があります.
例えば,状態(3, 0)に,A3を適用すると,3Lのコップを空にするため,初期状態の(0, 0)に戻ってしまいます.
(0, 0)は既に探索済みのため,次の行動を適用して,新たな状態を生成する必要はないことになります.
この結果,水差し問題において探索した状態数は 12 という結果でした(水差し問題の状態は,到達不可能な状態を除くと,14通り存在する).
課題
両方のコップが空の状態(0, 0)から始め,
3リットルのコップに正確に1リットルの水を入れた状態(1, 0)に到達するための解を求めなさい.
Google Colaboratoryで作成した AI-3.ipynb を保存し, ノートブック(.ipynb) をダウンロードして提出しなさい. 提出の前に必ず下記の設定を行うこと.
- ノートブックの設定で「セルの出力を除外する」のチェックを外す
- ノートブックの変更内容を保存して固定